1. Introduction
dge detection [1][2] is a fundamental problem of computer vision and image processing. It has been a major concerning issue in image segmentation [3][4][5][6][7] and for the researchers. The purpose of image segmentation is to partition an image into meaningful regions with respect to a particular application where edges in digital images are areas with strong intensity contrasts and a jump in intensity from one pixel to the next can create major variation in the picture quality and image segmentation. For computer vision and image processing systems to interpret an Image, they first must be able to detect the edges of each object in the image [8][9][10][11]. There are several edge detection operators available for image segmentation and object boundary extraction of digital images. Each operator is designed to be sensitive to certain types of edges. Among them Sobel, Roberts, Prewitt, LoG, and canny is major concerning operators. The geometry of the operator determines a characteristic direction in which it is most sensitive to edges.
The presence of noise is a problem for image segmentation. Images are very much prone to be affected by a verity of noise like Gaussian noise, Rayleigh noise, Impulse noise and Speckle noise. It has been found from the parent study that in presence of noise the Canny edge detection [12][13][14] operator has yielded the best subjective segmented view of the test image in respective of appearance and object boundary localization then Sobel, Roberts, Prewitt, and LoG. The entropy which is a statistical measure of randomness that can be used to characterize the texture of the input image is studied along with peak signal to noise ratio (PSNR), mean square ratio (MSE) and execution times are also studied in this paper. The objective of the present study is to compare various edge detection operators and analyze their performance and also performances of such techniques is carried out for an image by using MATLAB software. In this literature the section 2 introduces comprehensive theoretical and mathematical background for edge detection and explains different computing approaches to edge detection. Section 3 presents the proposed approach. Section 4 provides the experimental results and discussion and section 5 contains a quick discussion about the conclusion.
2. II.
3. Traditional edge detectors a) Sobel
The sobel edge detector computes the gradient by using the discrete differences between rows and columns of a 3X3 neighborhood. The sobel operator is based on convolving the image with a small, separable, and integer valued filter. Canny edge detection is a multistage algorithm to detect a wide range of edges in images. This detector finds edges by looking for local maxima of the gradient of f(x, y). The gradient is calculated using the derivative of a Gaussian filter. The method uses two thresholds to detect strong and weak edges and includes the weak edges in the output only if they are connected to strong edges.
4. III.
5. Proposed approach
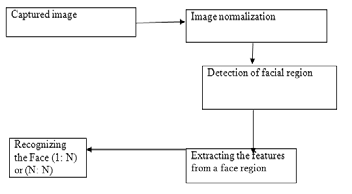
The flowchart of the proposed approach is given below. In proposed approach at very beginning a colored image is chosen and inserted into the Mat Lab software for processing. The image is converted into gray scale in the immediate step. A gray scale image is mainly combination of two colors, black and white. It 1. Peak signal to noise ratio (PSNR) is the ratio between the maximum possible power of a signal and the power of corrupting noise that affects the fidelity of its representation. It is the logarithmic function of the peak value of the image and the mean square error. Its value must be high. It have been observed that that the Canny edge detector produces higher accuracy in detection of object edges with higher entropy, PSNR, MSE and execution time compared with Sobel, Roberts, Prewitt, Zero crossing and LOG. On the other hand Roberts edge detector has the minimum entropy with PSNR, MSE and execution time compared with others. The statistical analyses for all the edge detectors are shown in table 1.
6. V. Conclusion
Since edge detection is the initial step in object boundary extraction and object recognition, it is important to know the differences between different edge detection operators. In this paper an attempt is made to review the edge detection techniques which are based on discontinuity intensity levels. The relative performance of various edge detection techniques is carried out with two images by using MATLAB software. It have been observed that that the Canny edge detector produces higher accuracy in detection of object edges with higher entropy, PSNR, MSE and execution time compared with Sobel, Roberts, Prewitt, Zero crossing and LOG.


| IMAGE | ENTROPY PSNR | MSE | EXECUTION | |
| TIME | ||||
| Trisha | 1.2820 | 11.4067 4.7034e+003 | 1.052911 | |
| with | seconds. | |||
| Sobel | ||||
| Trisha | 1.2792 | 11.3928 4.7185e+003 | 0.878266 | |
| with | seconds. | |||
| Prewitt | ||||
| Trisha | 1.2306 | 17.1396 1.2564e+003 | 0.831094 | |
| with | seconds. | |||
| Roberts | ||||
| Trisha | 1.4354 | 11.2313 4.8973e+003 | 0.978503 | |
| with LoG | seconds. | |||
| Trisha | 1.5701 | 10.9043 5.2803e+003 | 1.014961 | |
| with | seconds. | |||
| Canny | ||||
| Diya with | 1.2722 | 9.9365 | 6.5983e+003 | 0.851769 |
| Sobel | seconds. | |||
| Diya with | 1.2707 | 9.9374 | 6.5969e+003 | 0.855519 |
| Prewitt | seconds. | |||
| Diya with | 1.2493 | 9.9212 | 6.6215e+003 | 0.818108 |
| Roberts | seconds. | |||
| Diya with | 1.4318 | 9.9596 | 6.5633e+003 | 0.856581 |
| LoG | seconds. | |||
| Diya with | 1.5477 | 9.6982 | 6.9705e+003 | 1.040114 |
| Canny | seconds. | |||