1. INTRODUCTION
icroarrays, widely recognized as the next revolution in molecular biology, enable scientists to analyze genes, proteins and other biological molecules on a genomic scale [1]. A microarray is a collection of spots containing DNA deposited on the solid surface of glass slide. Each of the spot contains multiple copies of single DNA sequence [2].
Microarray expression technology helps in the monitoring of gene expression for tens and thousands of genes in parallel. During the biological experiment, the mRNA of two biological tissues of interest is extracted and purified. Each of the mRNA samples are reverse transcribed into complementary DNA (cDNA) copy and labeled with two different fluorescent dyes resulting in two fluorescence-tagged cDNA (red Cy5 and green Cy3). The tagged cDNA copies, called the sample probe, are hybridized with the slide's DNA spots. The hybridized glass slides are fluorescently scanned at different wavelengths (corresponding to the different contains a number of spots of various fluorescence intensities. The intensity of each spot is proportional to the hybridization level of the cDNAs and the DNA dots, the gene expression information is obtained by analyzing the digital images [3] [4].
The processing of the microarray images usually consists of the following three steps: (i) gridding, which is the process of assigning the location of each spot in the image. (ii) Segmentation, which is the process of grouping the pixels with similar features and (iii) Intensity extraction, which calculates red and green foreground intensity pairs and background intensities.
The evaluation of microarray images is a difficult task as the fluorescence of the glass slide adds noise floor to the microarray image. The processing of the microarray image requires noise suppression with minimal reduction of spot edge information that derives the segmentation process. Thus the task of microarray image enhancement is of paramount importance.
Non-linear filters exhibit better performance as compared to linear filters [5] when restoring images corrupted by impulse noise. Filtering techniques such as Vector Median Filter (VMF) [6], Progressive Switching Median Filter (PSMF) [7], Decision Based Algorithm (DBA) [8] etc., have been developed for removal of impulse noise. These techniques estimate noisy pixels taking into account all pixels within the window, without considering the status of (noisy/ noise-free) pixels. Consequently, the estimated noisy pixel value will not be accurate, degrading the quality of restored image.
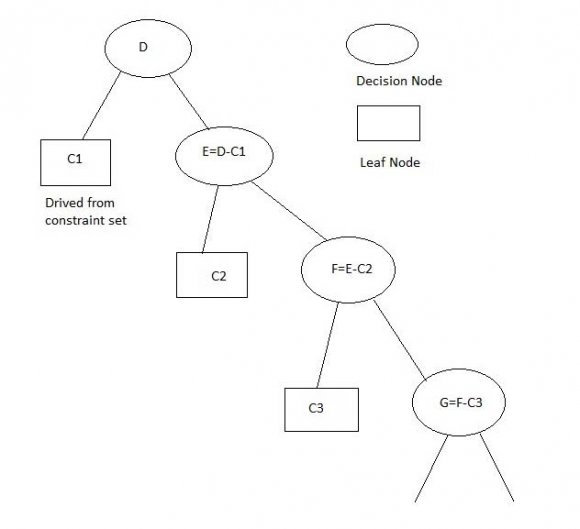
In this paper, we proposed a new iterative algorithm for removal of impulse noise in Microarray images. The algorithm emphasis on the noise-free pixels within small neighborhood. First the pixels affected with noise are detected. If we did not find certain number of noise-free pixels within neighborhood, then the central pixel is left unchanged. Otherwise the noisy pixel is replaced with the value estimated form the noise-free pixels within neighborhood. The process iterates until all noisy pixels are estimated in the image. The main steps of the proposed filtering algorithm are shown in figure 1. The rest of the paper is organized as follows:
Section 2 presents the impulse noise models in digital images, Section 3 presents the proposed iterative
2. II. IMPULSE NOISE IN DIGITAL IMAGES
Impulse noise is independent and uncorrelated to the image pixels and is randomly distributed over the image. For an impulse noise corrupted image all the image pixels are not noisy, a number of image pixels will be noisy and the rest of pixels will be noise free. There are two types of impulse noise namely fixed value impulse noise and random valued impulse noise.
In this paper, we focus on the detection and denoising of fixed valued impulse noise, namely salt and pepper noise. In salt and pepper type of noise the noisy pixels takes either salt value (gray level -225) or pepper value (grey level -0) and it appears as black and white spots on the images [9]. Consider a corrupted image Y of size NxM, which containing the salt and pepper noise with probability p is mathematically represented in the form:
(1) Where i=1,2,?.,M and j=1,2,?..N and 0<p<1. y ij represents the intensity of the pixel located at position (i, j). x ij and n ij denote the intensity of the pixel (i, j) in the original image and the noisy image respectively.
3. III.
4. THE PROPOSED ALGORITHM
The proposed algorithm is divided into three stages.
5. Stage 1: Construction Of Binary Image
In this step, a binary image is constructed for the noisy image Y. When the gray level images is contaminated with salt-and-pepper noise, a noisy pixel takes either a maximum intensity value (I max =255) or a minimum intensity value (I min = 0). This dynamic range [Imax Imin] provide information about the noisy pixels in the image. The binary image b ij is constructed by assigning a binary value 1, if the intensity of the pixel located at position (i, j) in the noisy image is I max or I min , otherwise assign a binary value 0.
The binary image B is computed from the noisy image Y as follows:
(2) where i=1,2,??N and j=1,2,??M. The entries of "1" and "0" in the binary image B represent the noisy and noise-free pixels, respectively. This binary image provides information about the noisy density in the corrupted image, which is used in the filtering process.
The Noise Density of the corrupted image is calculated as follows:
(3)
The value of the noise density (ND) ranges between 0 and 1.
6. Stage 2: Impulse Noise Filtering Method
Consider a window of size q x q at each pixel location (i, j) of the noisy image Y and the binary image B. We prefer to use the value of q (=3), because the larger size window may not be too efficient and effective. Larger window may also remove the edges and fine image details. By applying small window of size 3x3, we obtain the noisy image patch Y i,j and the binary image path B i,j .
For each iteration, we count the number of noisy pixels in the binary map B. If the value of count K is a positive integer and the central pixel y ij within the 3X3 window is noisy, then the array R is populated with noise-free pixels. The maximum length of the array R is eight, indicating all the pixels are noise free. The minimum length is zero, shows that all the pixels in the window are noisy. Depending upon the noisy density in the window, the length of the array varies from zero to eight.
We emphasize a constraint of minimum three noise-free pixels within the window, ie., the minimum length of the array R should be three. If this condition is satisfied, then we replace the central noisy pixel with the estimated value ie., (4) Where e s is the estimated value of the noisy pixel. Currently, we estimated the value of noisy pixels by using a suitable distance measure. The elements (noise-free pixels) in the array R are ordered on the basis of the sum of distances between each element and other elements in the array R. The sum of distances is arranged in ascending order and the same ordering is associated with the elements in the array R. The element in the array with the smallest sum of distances is the estimated value of the noisy pixel. If d i is the sum of distances of the i th element in the array R with all other elements, then (5) where 1?i?N , X i , X j are the elements in the array, N is the length of the array R, and Î?"(X i , X j ), is the distance measure given by L 1 norm.
7. The ordering may be illustrated as
and this implies the same ordering to the corresponding elements in the array R.
(7)
Where the subscripts are the ranks. Since the element with the smallest distance is the estimated noisy pixel, it will correspond to rank 1 of the ordered elements ie., X (1) . Figure 1 shows the main steps of the proposed algorithm. If the noisy pixel is estimated from the noise-free pixels within the window, the binary image B is also updated by changing the entries at the corresponding location of the image from "1" to "0". At the end of each iteration, we obtain a refined image G and updated binary image B. After a few iterations, depending upon the intensity of the salt-and-pepper noise, all entries in the binary image becomes zeros. The updating process terminated and we obtain a restored image G.
1. Take the intial noisy image Y. 2. Computation of binary map B 3. Compute the value of K that represent the noise-free pixels in B and assign Y?X 4. Check: If K=0, output resorted image X and stop. else i. Check if y ij is noisy, then do ii. Fill the array R with noise-free pixels iii. Check if length of array R >3 , do iv. Update b ij and xij using the value estimated from noise-free pixels in R. v. Process each y ij and get updated X and B vi. For the next iteration; assign X?Y and go to step 3.
8. EXPERIMENTAL RESULTS
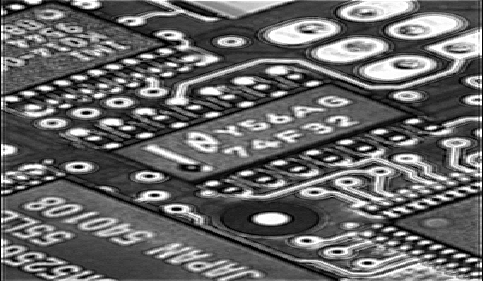
Noise removal steps of the microarray image are performed on a sample microarray slide that has 48 blocks, each block consisting of 110 spots. A sample block has been chosen and 108 spots of the block have been cropped for simplicity. The sample image is a 154*200 pixel image that consists of a total of 30800 pixels. The RGB colored image microarray image have been converted to grayscale image to specify a single intensity value that varies from the darkest (0) to the brightest (255) for each pixel shown in figure 2.
9. Image
First the microarray image is corrupted with varying levels of noise density from 10 to 90 using the salt-and-pepper noise. The simulation results obtained from the proposed scheme are compared with the well known salt-and-pepper filtering algorithms: AMF, PSMF and DBA. Figure 3 shows the results.
We used the image quality metric, peak signaltonoise ratio (PSNR), to measure the quality of the restored image. The PSNR measure is defined as Where MSE is the mean squared error between the original noise-free image and the restored image.
Table 1 shows the simulation results, in terms of the PSNR measure, for the microarray image. In table 1, our proposed algorithm provided the best PSNR value. Among other restoration algorithms, our proposed scheme highlights the best visible quality of the restored microarray image.
V.
10. CONCLUSION
In this work, we propose an iterative algorithm for removal of impulse noise in microarray images. The proposed scheme works iteratively by replacing the noisy pixel with the value estimated from the noise-free pixels within the small neighborhood for the entire image. This scheme provides superior performance in removing the noise, while preserving the fine image details and edges. The proposed algorithm provides noise suppression in the microarray image with minimal reduction of spot edge information that derives the segmentation process.

| ND= | ( | ) | |||
| January 2012 | |||||
| 38 | |||||
| y ij = | n ij , | zero or 255 with probability p | |||
| x ij , with probability 1- | p | ||||
| 1, if y ij =I max | |||||
| b ij = | 1, if y ij =I min | ||||
| 0, otherwise | |||||
| © 2012 Global Journals Inc. (US) | |||||
| January 2012 | |||||
| ND(in percentage) | VMF | PSMF | DBA | Proposed | |
| 40 | 10% | 33.74 | 36.41 | 38.24 | 43.64 |
| 20% | 28.47 | 30.27 | 32.44 | 37.47 | |
| 30% | 23.03 | 26.23 | 29.03 | 33.83 | |
| 40% | 18.15 | 20.25 | 21.15 | 26.62 | |
| 50% | 14.36 | 15.21 | 17.36 | 24.36 | |
| 60% | 11.61 | 13.06 | 15.61 | 21.61 | |
| 70% | 9.08 | 11.06 | 13.48 | 19.28 | |
| 80% | 7.16 | 9.46 | 12.06 | 13.16 | |
| Noisy Image (20%) | Noisy Image (40%) | Noisy Image (60%) | |||
| Filtered | Filtered | ||||